



当前位置: 凯发k8官方旗舰厅-凯发k8一触即发 > 新闻中心 > 技术前沿技术前沿
双目ccd结构光三维测量系统中的立体匹配研究
1 引 言
在反向工程中,准确、快速、完备地获取实物的三维几何数据,即对物体的三维几何形面进行三维离散数字化处理,是实现反求工程的重要步骤之一。常 见的物体三维几何形状测量方法基本可分为接触式和非接触式2大类,双目ccd(电荷耦合器件charge coupled devices)结构光测量技术作为非接触式,是目前世界上光学测量的最先进技术之一,在反向工程中有着广泛的应用。匹配是立体视觉中最复杂、最重要的环 节,近年有许多文献提出恢复外极几何基础矩阵的算法,以实现两张未标定图像的匹配[1-2]。总结起来目前匹配方法可分为基于特征匹配、基于面积匹配和基于相位匹配。特征匹配主要以零交叉点和梯度为依据,受噪声影响较小,但仅能获得稀松的视差;面积匹配可以获得稠密的视差,但主要依据为灰度连续性,受噪声 影响较大,尤其是对交叉摆放的双目ccd立体视觉系统,左右图像灰度变化不一致,核线互不平行,误匹配几率增大;相位匹配一般是针对核线平行而言,虽然将 空间域转化为时间域,可同样存在邻域奇异性。立体视觉用于物体三维测量时,为增大测量面积,减少遮挡,提高测量精度,常采用交叉摆放的双目ccd立体视觉系统。在交叉ccd测量系统中,由于核线不平行,立体匹配更为困难。文中针对反向工程中三维测量的特点,对被测物体投射解相光栅和编码光栅,用解相 光栅进行解相得到折叠在[-π,π]区间内的相主值,用结构光编码方法进行相展开得到相位的周期,二者相加得到真实相位值,从而实现相同相位曲线的匹配, 再根据外极约束特性,实现交叉摆放的双目ccd立体视觉系统像素级的立体匹配。
2 结构光编码、解码及相位求解
本文将结构光编码引入相展开领域。用该方法进行相展开,使过程变得相对简单,不依赖于路径,不存在误差的传播,对噪声的抗干扰能力强,与解相过程有机结合能够得到准确的周期。
2.1 基本原理
编码结构光如图1所示,此处仅以3幅编码结构光图像为例。
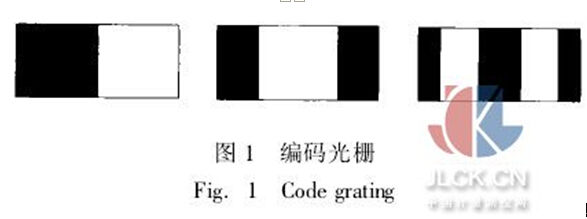
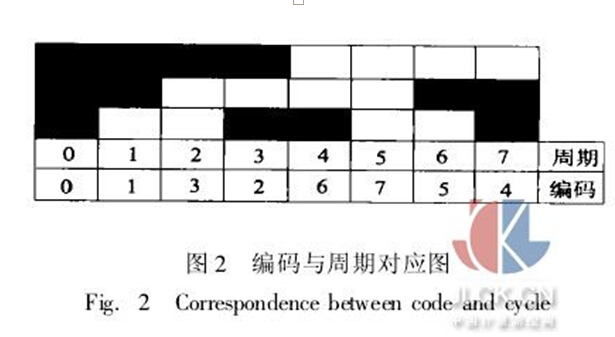
编码结构光是具有不同节距的一系列二值光栅,将这3幅光栅投射在物体上,被测空间被划分为8个区域。如果是n幅光栅,则被测空间划分为2n个区 域。根据各个点在不同图像中的亮度进行编码,每个区域由一个3位二进制编码表示,有光栅的部分记为“0”,无光栅的部分记为“1”。这个编码是与该点所处 的周期相联系的,因此可以由编码与周期的对应关系得到被测物体上栅线的周期分布,从而基本完成相展开过程。编码与周期的对应关系见图2。根据被测空间的大 小以及对精度的要求,可以灵活调整投射编码结构光的数目,也即调整周期的数目。
编码结构光是满足一定条件的结构光,它满足以下3个条件:
(1)在被测空间内编码必须是无二义性的,这样才能保证没有相同的相值出现。
(2)相邻两个编码间的hamming距离为1。相邻两个编码之间不同位的数目称为hamming距离。如果hamming距离不为1,则在相邻两个编码交界处容易产生较大的误差。
(3)编码光栅系列中最小光栅节距要与用于解相的光栅节距相同。节距指的是一个周期所包含的像素点数,这样才能将结构光编码的方法有效地应用于相位展开,并与解相结果有机地结合在一起,保证最后得到相值的无重复性。
2.2 相位求解
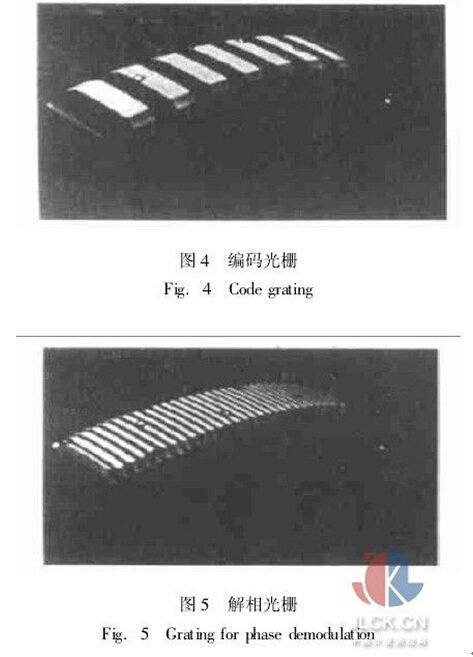
相位求解是为了得到图像上的所有点的相位,然后利用插值算法获得相同相位点的曲线并进行标号。首先投射用于解相的光栅,经摄像机采集回计算机中进行解相,得到折叠在[-π,π]区间内的相主值。再投射一系列编码光栅,这些二值光栅的黑白条纹在被测物体上形成明暗相间的灰度条纹,将这些灰度图像分 别拍摄下来进行二值化处理,得到一系列经物体高度调制后畸变的编码光栅图像。由这些图像进行相位展开的计算,得到栅线的初步周期分布,再经过一些调整即可 得到准确的周期分布。
干涉长的光强分布可表示为:

式中id(x,y):干涉场直流光强分布
ia(x,y):干涉场交流光强分布
φ(x,y):被测波面相位
δ(t):两干涉光路中的可变相位
固定δ(t) =δ0,读干涉图中的条纹序号n(x,y),由此获得被测波面的相位信息φ(x,y)=2πn(x,y)。其中条纹序号的测量不确定度只能做到0. 1,相位被测面的面形不确定度在0. 1~0. 05λ。对于给定的干涉场(x,y)处,id,ia,φ均未知,所以至少需要δ(t1),δ(t2),δ(t3)三幅干涉图才能求解出φ(x,y) [4]。为了减小干涉测量不确定度,设法采集多幅相位变化干涉图,然后利用数值算法解出精确的φ(x,y)。
3 基于外极约束的对应点求解
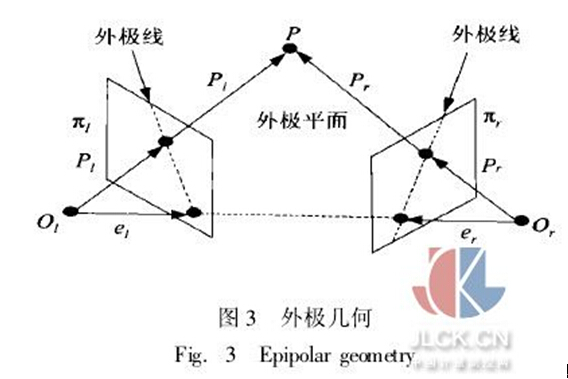
图3是双目ccd空间示意图,称为外极几何(epipolar geometry)[5]。空间任意一点p与左右透视中心ol,or构成一个平面,称为外极平面(epipolarplane),外极平面与左右像面相交形成两条外极线(epipolar line),也互称共外极线。对于交叉摆放的双目ccd,每一像面上的外极线都相交于一点el,er,即外极中心(epipole)。由立体视觉理论可 知,左右像面上任意一对对应点必然在它们相应的外极线上。
设左右摄像机坐标系分别为(xl,yl,zl)和(xr,yr,zr),其中ol,or为左右摄像机的透视中心。左右摄像机坐标系变换关系为:

左摄像机透视中心ol在右像面的投影点为右外极中心 ,同理右摄像机透视中心or在左像面的投影点为左外极中心
,同理右摄像机透视中心or在左像面的投影点为左外极中心 。左像面任意一点pl在右像面的外极线为外极平面与左像面的交线,同理右像面任意一点pr在左像面的外极线为外极平面与右像面的交线,并且所有的外极线过外 极中心,因此可根据左右摄像机坐标对应关系求解外极线方程。设左像面上斜率为kl,并过el点的直线,在右像面上的外极线斜率为kr,并过er的直线,推 导出kl到kr的变换关系和kr到kl的变换关系[6]:
。左像面任意一点pl在右像面的外极线为外极平面与左像面的交线,同理右像面任意一点pr在左像面的外极线为外极平面与右像面的交线,并且所有的外极线过外 极中心,因此可根据左右摄像机坐标对应关系求解外极线方程。设左像面上斜率为kl,并过el点的直线,在右像面上的外极线斜率为kr,并过er的直线,推 导出kl到kr的变换关系和kr到kl的变换关系[6]:

对于相位求解后的标号曲线图像,可利用外极特性沿曲线寻找对应点。设左标号曲线图像为参考图像,右图像为待匹配图像,首先求出沿左图像某标号曲 线的任一点pl与左外极中心el连线的斜率kl,再求pl右图像外极线的斜率kr,由斜率kr和右外极中心er求出外极线,并求出其与相应标号曲线的交 点,即pl的对应点。
4 实验与结论
基于结构光编码、解码及相位求解的双目ccd三维测量系统不但在理论上是可行的,而且在实际应用中已取得很好的效果。这种测量系统操作方便,可 以对不同大小尺寸的物件进行测量,精度可以达到0. 03 mm,而且测量速度也较快。使用这种测量系统进行测量主要有3个步骤: (1)对系统进行标定,获得摄像机内外参数,建立摄像机坐标系与世界坐标系的关系; (2)对物件进行结构光投影测量,求解对应点,得到物体点的三维坐标。对于大型物件,要移动测量系统或物件,对物件进行分区域拼接测量; (3)数据处理,对测量得到的点云数据进行处理,最终得到物件的3d模型。
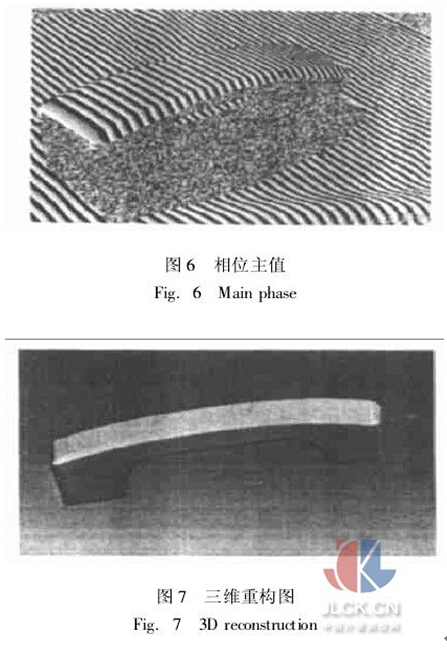
在反向工程中,用本文所述方法对电话接线筒进行三维测量,以构造出它的三维cad模型。首先对测量系统进行标定,求解摄像机内外参数,如建立摄 像机坐标系与世界坐标系的关系;然后利用投影仪投射编码光栅和解相光栅于被测物体,实验所用的是6幅编码光栅,即64周期的栅线。图4是编码光栅的第1 幅,图5是解相光栅,图6是使用解相光栅得到的折叠在[-π,π]之间的相位主值。由相位主值和编码光栅得到的周期就可以求出真实相位值,再利用外极约束,即可实现左右ccd图像点的匹配。最后是数据的后处理工作,利用测得的数据点云在软件unigraph-ics18. 0中进行三维cad造型,得到接线筒的三维重构图,如图7所示。实验证明了该方法进行匹配的可行性和准确性。
总之,这种基于结构光编码、解码、相位求解及外极约束相结合的方法实现了交叉摆放的双目ccd系统的立体精确匹配,这种方法已用于反向工程中的物件测量,实验证明该测量方法测量误差小,测量时间短,匹配算法具有鲁棒性。
凯发k8官方旗舰厅-凯发k8一触即发 | 关于凯发k8一触即发 | 凯发k8一触即发的产品中心 | 案例展示 | 新闻中心 | 联系凯发k8一触即发 | 服务中心

 | 深圳市精易迅科技有限公司"));
| 深圳市精易迅科技有限公司"));